|
 Most of my recent work has been in the area of virtual environments and augmented reality, although
historically I have had interest in both
computer animation (see projects) and
virtual environments (see projects). In computer animation, I
develop methods that allow the creation of visually compelling human
motion. I am especially interested in the evaluation of such methods,
and how such evaluation informs the design process. Evaluation
techniques for animation contain a strong perceptual component, which
closely links with my related research interest, that is, how people
perceive and act on their perceptions in virtual environments. I am
particularly interested in the construction of virtual environments
that leverage perceptual affordances. Outside of these, I
am also interested in a variety of other interesting research.
Most of my recent work has been in the area of virtual environments and augmented reality, although
historically I have had interest in both
computer animation (see projects) and
virtual environments (see projects). In computer animation, I
develop methods that allow the creation of visually compelling human
motion. I am especially interested in the evaluation of such methods,
and how such evaluation informs the design process. Evaluation
techniques for animation contain a strong perceptual component, which
closely links with my related research interest, that is, how people
perceive and act on their perceptions in virtual environments. I am
particularly interested in the construction of virtual environments
that leverage perceptual affordances. Outside of these, I
am also interested in a variety of other interesting research.
Background My interest in virtual environments (VEs) is to
study them as learning environments. As such, my work explores higher
level design issues associated with learning environments. My work can
be categorized into desktop learning systems and immersive virtual
environments. The important point of this work is to build systems
that allow people to learn in meaningful contexts and situations. For
immersive virtual environments, my research develops design principles
for immersion that allow environments where people can actively
explore and guide their own learning. For desktop environments, my
work has focused on the incorporation of compelling animation into a
learning system, called the teachable agent system.
Specific Projects:
- Spatial reasoning and locomotion in HMD-based virtual environments
 A significant problem for HMD-based
virtual environments that are large and that enable people to actively explore them will then
be the problem of space. Having large areas suitable for active
exploration of a large virtual environment is often not practical.
This work addresses issues of learning in virtual environments and how
subjects can explore large environments on foot when physical space
is constrained.
A significant problem for HMD-based
virtual environments that are large and that enable people to actively explore them will then
be the problem of space. Having large areas suitable for active
exploration of a large virtual environment is often not practical.
This work addresses issues of learning in virtual environments and how
subjects can explore large environments on foot when physical space
is constrained.
- Pedestrian Safety
 We investigate how people
perceive approaching traffic in virtual environments. The goal of this
study is to improve pedestrian traffic crossings. This work is important since there were
over 5900 pedestrian fatalities in 2016 in the United States. People with reduced vision are
at higher risk.
We investigate how people
perceive approaching traffic in virtual environments. The goal of this
study is to improve pedestrian traffic crossings. This work is important since there were
over 5900 pedestrian fatalities in 2016 in the United States. People with reduced vision are
at higher risk.
- Animated Learning Environments
-
 This work examines the means and utility of using animated agents to promote positive learning
experiences. The particular target audience is K-12 students. The paradigm and platform that we explore animated
under are teachable agents.
This work examines the means and utility of using animated agents to promote positive learning
experiences. The particular target audience is K-12 students. The paradigm and platform that we explore animated
under are teachable agents.
 Background.
The most fundamental issue in using animation in a learning system is
the problem of authoring the animation. Authoring visually
compelling animation is a difficult and time-consuming task. People
are able to perceive subtle movements and attribute style, emotion,
and intent to these movements, and thus the bar for quality animation
is high. Most animation techniques are ad hoc and employ
heuristic techniques to achieve acceptable results. Authoring methods
for animation can be broadly classified into three categories: motion
capture, dynamic simulation, and keyframing. Motion capture is a
popular process for generating human animation, in which sensors are
attached to a performer and the motion of the performer is recorded
for later playback in a graphical character. Dynamic simulation uses
the physics of the graphical character to constrain the motion to be
physically correct. Keyframing is the traditional Disney-like type of
animation. My research has made contributions for all three of these
techniques.
Background.
The most fundamental issue in using animation in a learning system is
the problem of authoring the animation. Authoring visually
compelling animation is a difficult and time-consuming task. People
are able to perceive subtle movements and attribute style, emotion,
and intent to these movements, and thus the bar for quality animation
is high. Most animation techniques are ad hoc and employ
heuristic techniques to achieve acceptable results. Authoring methods
for animation can be broadly classified into three categories: motion
capture, dynamic simulation, and keyframing. Motion capture is a
popular process for generating human animation, in which sensors are
attached to a performer and the motion of the performer is recorded
for later playback in a graphical character. Dynamic simulation uses
the physics of the graphical character to constrain the motion to be
physically correct. Keyframing is the traditional Disney-like type of
animation. My research has made contributions for all three of these
techniques.
Specific projects:
- Motion Transitions
-
 Much computer animation is generated by concatenating clips of motion together. Vital
to the success of this method is the proper generation of motion transitions, segues
between the motion segments. For reasons of computational efficiency, linear transitions
between segments are often used. This work has explored methods of constructing transitions,
and psychophysics of how transitions are perceived.
Much computer animation is generated by concatenating clips of motion together. Vital
to the success of this method is the proper generation of motion transitions, segues
between the motion segments. For reasons of computational efficiency, linear transitions
between segments are often used. This work has explored methods of constructing transitions,
and psychophysics of how transitions are perceived.
- Reusing Traditional Animation
 This work explores the computer-assisted creation of novel cartoon animation. Sometimes, the realism of motion capture or
dynamic simulation is not wanted. One can imagine
learning environments, particularly for children, in which
traditionally animated characters with caricatured or non-human features serve as a better representation for
an agent. Authoring, editing, and re-using traditional animation are some of the
most difficult and time-consuming animation tasks.
This work explores the computer-assisted creation of novel cartoon animation. Sometimes, the realism of motion capture or
dynamic simulation is not wanted. One can imagine
learning environments, particularly for children, in which
traditionally animated characters with caricatured or non-human features serve as a better representation for
an agent. Authoring, editing, and re-using traditional animation are some of the
most difficult and time-consuming animation tasks.
- Motion Capture
-
 Our work developed methods to
insure that the recording process is done as faithfully as
possible. This collaborative work
unlocked motion capture data for use in synthesis algorithms by
developing techniques to robustly estimate skeleton size and process
similar motions into compatible sets. These results led to methods
for controllable synthesis of stylistically similar but novel
motions.
Our work developed methods to
insure that the recording process is done as faithfully as
possible. This collaborative work
unlocked motion capture data for use in synthesis algorithms by
developing techniques to robustly estimate skeleton size and process
similar motions into compatible sets. These results led to methods
for controllable synthesis of stylistically similar but novel
motions.
- Variability in dynamic simulations
 Building active dynamic simulations that produce visually compelling motion is fundamentally one of
control design. Animation generated by dynamic simulation is sometimes criticized as appearing ``robotic,'' and part of
the reason for this criticism can be traced to a lack of variability
in the motion, i.e., a repetitive motion is a boring motion. This work adds variability to the control structure
in ways that result in stable, yet pleasing motion.
Building active dynamic simulations that produce visually compelling motion is fundamentally one of
control design. Animation generated by dynamic simulation is sometimes criticized as appearing ``robotic,'' and part of
the reason for this criticism can be traced to a lack of variability
in the motion, i.e., a repetitive motion is a boring motion. This work adds variability to the control structure
in ways that result in stable, yet pleasing motion.
Background
I have been privileged to work with colleagues both from Vanderbilt University
and nationally. Some of the projects we've worked on are listed here.
- Computational Photography - Relighting
-
 Lighting has long been recognized as a difficult
problem in the field of computer graphics.
We apply simplified image-based lighting
methods to reduce the equipment, cost, time, and specialized skills
required for high-quality photographic lighting of desktop-sized
static objects such as museum artifacts.
Lighting has long been recognized as a difficult
problem in the field of computer graphics.
We apply simplified image-based lighting
methods to reduce the equipment, cost, time, and specialized skills
required for high-quality photographic lighting of desktop-sized
static objects such as museum artifacts.
- Learning and Generation of Robotic Behaviors
-
 The relationship between humanoid robotics and human-figure animation
is synergistic, as each discipline provides tools and techniques of
use to the other. Viewing robots as primitive
learners, our results show that a robot can learn to interact
purposefully with its environment through a developmental acquisition
of sensory-motor coordination.
The relationship between humanoid robotics and human-figure animation
is synergistic, as each discipline provides tools and techniques of
use to the other. Viewing robots as primitive
learners, our results show that a robot can learn to interact
purposefully with its environment through a developmental acquisition
of sensory-motor coordination.
- Visualization of Computational Models of Cognition
-
 Computational models of cognition often exhibit rich complex dynamics
that are difficult to discern without the use of visualization
tools. We developed
NAV, the Node Activity Visualizer, to remedy these deficiencies. NAV
provides a sketch-based interface for constructing a graphical
neural model and to display node activation levels, and can generate
animations of simulation results.
Computational models of cognition often exhibit rich complex dynamics
that are difficult to discern without the use of visualization
tools. We developed
NAV, the Node Activity Visualizer, to remedy these deficiencies. NAV
provides a sketch-based interface for constructing a graphical
neural model and to display node activation levels, and can generate
animations of simulation results.
- 3-D Visualization of Proteomic Information
-
 This work developed methods to pre-process and visualize
matrix-assisted laser desorption ionization imaging mass spectrometry
(MALDI IMS) data aligned with optically determinable tissue structures
in three dimensions.
This work developed methods to pre-process and visualize
matrix-assisted laser desorption ionization imaging mass spectrometry
(MALDI IMS) data aligned with optically determinable tissue structures
in three dimensions.
- Transmission of Meshes over Lossy Channels
-
 The continual improvement in computer performance together with the
prevalence of high-speed network connections with high throughput
and moderate latencies enables the deployment of multimedia
applications, such as collaborative virtual environments, over wide
area networks. We modified the progressive meshes for use
in two transmission schemes, a hybrid transmission that
uses TCP and UDP to send packets and a forward error-correcting
transmission scheme that uses redundancy to decode the information
sent.
The continual improvement in computer performance together with the
prevalence of high-speed network connections with high throughput
and moderate latencies enables the deployment of multimedia
applications, such as collaborative virtual environments, over wide
area networks. We modified the progressive meshes for use
in two transmission schemes, a hybrid transmission that
uses TCP and UDP to send packets and a forward error-correcting
transmission scheme that uses redundancy to decode the information
sent.
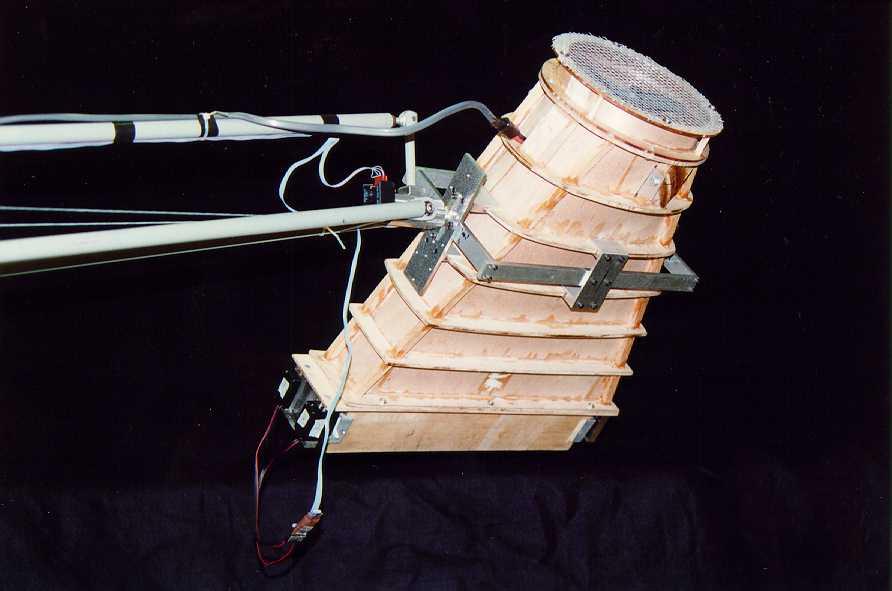
Graduate work in Automatic Control
 While a graduate student at Caltech, I worked on control
techniques for a thrust-vectored ducted fan engine, a system built and maintained there. The
ducted fan is an interesting example because it's unstable and nonlinear. You can find out
more about it by going the Ducted Fan
Project Page. Note that I worked on the ``old'' ducted fan; the new one is less nonlinear
and much nicer.
While a graduate student at Caltech, I worked on control
techniques for a thrust-vectored ducted fan engine, a system built and maintained there. The
ducted fan is an interesting example because it's unstable and nonlinear. You can find out
more about it by going the Ducted Fan
Project Page. Note that I worked on the ``old'' ducted fan; the new one is less nonlinear
and much nicer.
|